您的需求 我的专业
![]() 全国免费热线:
全国免费热线:
您的需求 我的专业
![]() 全国免费热线:
全国免费热线:

伺服电机和步进电机的原理差异和性能比较
步进电机
原则
步进电机是用于控制的特殊电机,并且是将电脉冲转换为角位移的执行器。当步进驱动器接收到脉冲信号时,其驱动步进电动机沿设定方向旋转固定角度(称为“步进角度”),并以固定步进角度逐步旋转。可以通过控制脉冲数来控制每个位移,以达到精确的定位目的。同时,可以通过控制脉冲频率来控制电动机旋转的速度和加速度。调速的目的如果更改绕组的通电顺序,则电动机会反转。

原则
步进电机必须由专用的步进电机驱动器驱动,该驱动器包括脉冲发生控制设备,电源驱动设备和保护设备。功率驱动单元放大由脉冲产生控制单元产生的脉冲,并且直接与属于微控制器的功率接口的步进电动机和步进电动机连接。

控制命令单元接收脉冲和方向信号,相应的脉冲生成控制单元生成一组具有相应相位编号的脉冲,然后将其传输到动力驱动单元之后的步进电机和步进电机旋转一个。在该方向上的步距角。驱动器的脉冲设置模式确定步进电机的运行模式,如下所示:
(1)m顶部m拍摄操作
(2)m相双m拍频操作
(3)m相单和双m拍操作
(4)细分驱动,驱动程序必须提供各种幅度的驱动信号。
步进电动机具有一些重要的技术数据,例如最大静态转矩,启动频率,工作频率等。通常,步进角越小,电动机的最大静态转矩越大,则启动频率和工作频率越高,这强调了驱动模式下的细分驱动技术,提高了转矩和分辨率。步进电机,完全消除了电机的低频振动。因此,分段驱动器比其他类型的驱动器具有更好的驱动器性能。
伺服电动机内部的转子是永磁体,由驱动器控制的U/V/W三相电形成电磁场,转子在该磁场的作用下旋转。它将电机反馈信号的编码器传递给驱动器,该驱动器将其与目标值进行比较,并调整转子的旋转角度。
▌伺服电机
伺服电动机的原理
伺服电动机也称为运行电动机,用作将从自动控制系统接收的电信号转换为电动机轴的角位移或角速度输出的致动器。它分为两类:DC和AC伺服电机。
当伺服电机接收到1个脉冲时,它旋转与1个脉冲相对应的角度以实现位移。由于伺服电动机本身具有发送脉冲的功能,因此,每当伺服电动机旋转一个角度时,就以这种方式由伺服电动机接收到的脉冲形成一个闭环。系统知道向伺服电机发送了多少个脉冲,以及同时接收了多少个脉冲。这样,可以精确地控制电动机的旋转并精确地对其进行定位。
在性能比较方面,交流伺服电机优于直流伺服电机,交流伺服电机采用正弦波控制,转矩脉动较小,容量较大。直流伺服电机采用梯形波控制,相对较差。直流伺服电动机的无刷伺服电动机的性能要优于有刷伺服电动机。
伺服电机驱动器
伺服电动机内部的转子是永磁体,由驱动器控制的U/V/W三相电形成电磁场,转子在该磁场的作用下旋转。它将电机反馈信号的编码器传递给驱动器,该驱动器将其与目标值进行比较,并调整转子的旋转角度。
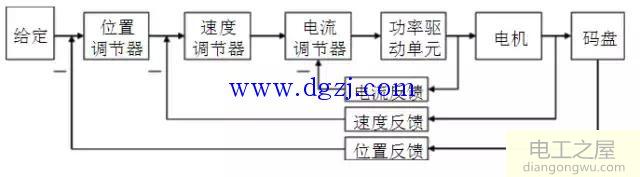
有刷直流伺服电机驱动器:电机的工作原理与普通直流电机相同。驱动器具有从内部到外部的三个电流回路和速度回路的闭环结构。位置循环。电流回路的输出控制电动机的电枢电压。电流环的输入是速度环PID的输出,速度环的输入是位置环的PID输出和位置的输入。回路是给定的输入,控制原理图如上图所示。
无刷直流伺服电机驱动器:电源为DC,通过内部三相逆变器将其转换为U/V/W AC电源,并提供给电机。驱动器还具有三个闭环控制结构(电流环,速度环,位置环),驱动控制原理与上述相同。
交流伺服电机驱动器:大致可分为两个模块:功能相对独立的电源板和控制板。控制板通过相应的算法输出PWM信号,该信号用作驱动信号。驱动电路改变变频器的输出功率,达到控制三相永磁同步交流伺服电机的目的。
功率驱动单元首先通过三相全桥整流电路对输入的三相功率或主功率进行整流,以获得相应的直流电。三相永磁或交流主电源经过整流后,通过三相正弦脉宽调制PWM电压变频器变频驱动三相永磁同步交流伺服电机,这是一个简单的AC-DC-AC转换过程。
控制单元是整个交流伺服系统的核心,实现系统位置控制,速度控制,转矩和电流控制。
▌伺服电机和步进电机的性能比较
控制精度:步进电机的相位和位数越多,精度越高。伺服电机基于内置编码器。编码器的比例越大,精度越高。
低频特性:步进电机在低速时容易受到低频振动的影响。在低速运行时,通常使用阻尼或分段技术来克服低频振动。伺服电机运行非常平稳。 lea。发生振动。
转矩频率特性:步进电动机的输出转矩随着速度的增加而减小,并在高速时迅速减小。伺服电机在额定转速内具有恒定的转矩输出,在额定转速下具有恒定的功率输出。
过载能力:步进电机没有过载能力,而伺服电机具有很强的过载能力。
操作性能:步进电机的控制是开环控制。如果启动频率太高或负载太大,则很容易失去步伐或失速。如果速度太高,这很容易。交流伺服驱动器系统为闭环控制,驱动器可以直接采样来自电机编码器的反馈信号。位置环和速度环形成在内部。通常没有步进电机的步进损耗或过冲。控制性能更加稳定。
速度响应性能:虽然步进电机从静止速度加速到工作速度需要数百毫秒,但AC伺服系统具有更好的加速性能,通常只有几毫秒,并且可以用于控制。需要快速启动和停止的情况。
© 2020 西门子(贝得)电机 版权所有 沪ICP备16040912号-3 xml
