您的需求 我的专业
![]() 全国免费热线:
全国免费热线:
您的需求 我的专业
![]() 全国免费热线:
全国免费热线:

步进电机驱动负载可以以所需速度启动,并且如果驱动速度超过自启动脉冲频率,则无法以该速度启动。因此,只能启动低于电动机启动脉冲频率的速度命令。加速方法采用将速度线性增加到所需速度的方法,称为低速加速驱动。下图显示了步进电机的加速度和速度-转矩特性。
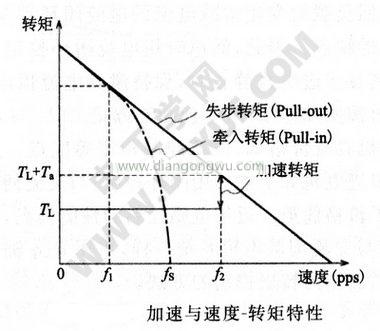
步进电动机的速度转矩特性包括失步转矩(同步断开转矩)和引入转矩(同步引入转矩)。现在,当负载转矩TL的负载由频率f2驱动时,自启动脉冲频率不应大于频率f2的值。它以非常低的频率f1启动电动机,然后加速到频率f2。此时,负载中还包含转子惯性J,即加速惯量,并且需要所需的惯性加速扭矩Tα,因此,两个扭矩(TL +Tα)产生的扭矩将是启动至启动所需的扭矩。速度频率f2。此时,在下一个步进电机运动模式下,加速扭矩是第一项。
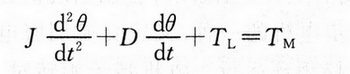
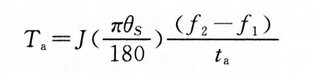
此梯形的面积等于总步数,并且电机轴在水平轴时间内旋转通过等效梯形面积的步角,并将负载拉至相应位置。假设加速时间为ta且步距角为θs,则加速转矩由下式表示。
步进电动机的失步转矩是电动机可以产生的最大转矩。在先前文章《步进电机:细分步进驱动》的以下公式中,负载角δ=π/2产生失步转矩,并且电动机达到f2。在速度状态下,仅将TL负载添加到电动机转矩中,并且减小功率角和电动机,从而使速度f2和TL平衡变为δ。

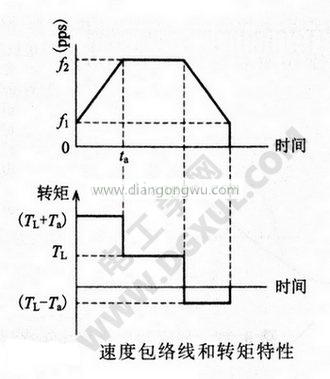
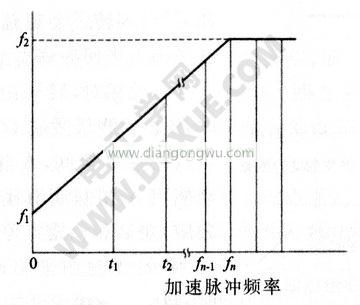
如图所示,减速时也会产生反方向的转矩。此时,负载角δ为负,产生相反方向的转矩。加速时的加速脉冲频率如下图所示,梯形的面积S由加速时间决定。即,每个梯形的面积S等于阶梯角。
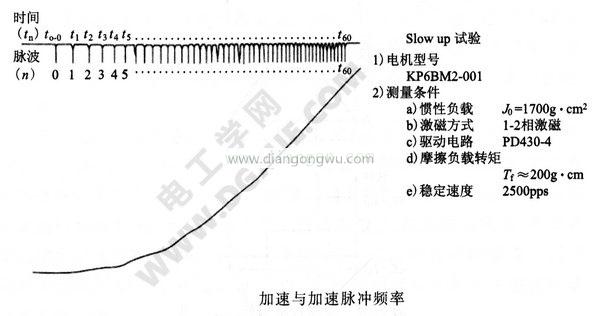
下图显示了从减速开始的两相HB型1.8°步进电动机的加速度曲线。这是步进电动机的梯形驱动曲线,电动机可以快速到达目标位置而不会丢失步数。
© 2020 西门子(贝得)电机 版权所有 沪ICP备16040912号-3 xml
