您的需求 我的专业
![]() 全国免费热线:
全国免费热线:
您的需求 我的专业
![]() 全国免费热线:
全国免费热线:

1、按信号的原理分:增量式编码器、绝对式编码器、混合式编码器
1)增量编码器
直接使用光电转换原理,它输出三组方波脉冲A,B和Z相,A和B脉冲的相位差为90o,因此很容易确定旋转方向,但是Z为1每转的相位。它位于脉冲的参考点。具有原理结构简单,平均机械寿命达数万小时以上,抗干扰能力强,可靠性高,适用于长距离传输的优点。缺点是它不能输出轴旋转的绝对位置信息。
2)绝对编码器
使用自然二进制或圆形二进制(灰色代码)方法进行光电转换。绝对编码器和增量编码器之间的区别是光盘的透明和不透明线条图案。绝对值编码器可以具有多个代码,并且可以根据读取的代码盘上的代码来检测绝对位置。编码设计可以采用二进制码,循环码,二进制补码等。其特点如下:
(1)您可以直接读取角坐标的绝对值。
(2)没有累积错误。
(3)即使切断电源,位置信息也不会丢失。但是,分辨率取决于二进制系统中的位数,因此精度取决于位数,目前有10位,14位等。
3)混合绝对编码器
打印两组信息。一组信息与绝对信息功能一起用于检测刺激位置,另一组信息与增量编码器的输出信息完全相同。
绝对编码器是用于直接编码和直接测量的传感设备。它可以表示位置的绝对值,不存在累积误差,并且在切断电源后位置信息也不会丢失。常用的编码器包括代码盘和统称为代码盘的代码标尺。有一些编码器,例如二进制码,二进制循环码(格雷码),二进制十进制码,它们使用编码器的数量进行分类。在结构原理分类中,有几种类型:接触,光电和电子。
混合绝对编码器用于在同一代码盘上创建增量代码和绝对代码。磁盘的最外圈具有密集的增量条带。它的中间有4个代码通道,形成一个绝对的4位格雷码。每个四分之一同心圆通过格雷码分为16个相等的段。该代码盘的工作原理是粗略,中等和精细计算的三极管系数。码盘的转数表示为“ 1转脉冲”的计数。一转内的角位置由4 * 16个不同的格雷码值表示。每四分之一圈的格雷码细分是通过最外面的圈的增量码完成的。
增量式光电编码器:速度测量,旋转方向测量,行进角度和距离测量(相对)。
答:其工作原理图
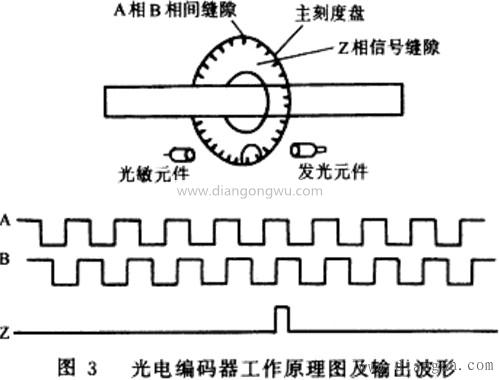
B:工作原理:
1)光电编码器的配置:以中心为轴且透光和不透明线规则地刻在光盘上的光电编码盘,在其两侧放置发光元件和感光元件。当光盘旋转时,感光元件接收到的光束与透光带同时变化,在感光元件的输出波形重新形成后,将其转换成脉冲,并形成四组正弦波信号组合获得。 A,/A,B,/B,每个正弦波的相位差为90度,相位差(每个周期360度)用于确定旋转方向。编码器具有Z相显示(参考机械零位置),并且每次Z相脉冲旋转以指示零位置参考位置时都会输出。
2)由于A相和B相相距90度,因此可以通过比较A相是正相还是B相是正相来确定编码器的正向和反向旋转。 B相脉冲的光电编码器是正向的,否则是反向的,通过零脉冲,可以获得编码器的零参考位置。
3)如果需要固定脉冲数并提高分辨率,则可以使用两个相位差为90°A和B的信号将原始脉冲数增加一倍或四倍。
4)轴的每次旋转,增量编码器都会提供一定数量的脉冲。您可以使用定期测量或每单位时间的脉冲数来测量移动速度。如果脉冲数在参考点之后累积,则计算出的值表示旋转角度或行程参数。双通道编码器的输出脉冲之间的相位差为90o。能够接收脉冲的电子设备可以接收信号以引起轴的旋转,因此可以用于实现双向位置控制。此外,3通道增量式旋转编码器每转会产生一个脉冲,称为零信号。
C:车牌信息
a)脉冲信号
1.步骤A
2.B步骤
3.Z步骤

编码器材料包括玻璃,金属和塑料。由于玻璃上附有细划线,因此玻璃线盘具有良好的热稳定性和高精度。金属帘线圆盘上直接刻有通过线和难以穿透的线。它不容易破裂,但是由于金属的厚度恒定,因此精度受到限制,并且热稳定性比玻璃差得多。塑料帘线盘经济且成本低廉,但准确性较低。热稳定性和寿命会变差。
b)分辨率
编码器每360度旋转提供的开放或深色雕刻线的数量称为分辨率(也称为分辨率索引)或直接频率,通常每旋转5到10,000条线。
c)机械速度和电气速度
机械速度
基于每分钟最大转数,编码器的机械速度为——rpm。
电动速度
编码器的电气速度也称为开关频率,它是读取每个脉冲信号的响应速度,表示为每秒—— Hz。1.最大工作速度应考虑编码器的机械和电气速度以及编码器后续接收设备的开关频率。
Nmax=Fmax×60/Z; Nmax:最大速度; Fmax:最高响应频率; Z:每转输出脉冲数
2.光电编码器每秒输出的脉冲数:
N=电动机速度n×每转的行数/60
例如,当电动机速度n=1000rpm且行数为600时,光电编码器的每秒脉冲数应为:
N=1000×600/60=10000(pcs)脉冲
n=1转/分钟
然后N=1×600/60=10(pcs)
d)信号输出:正弦波(电流或电压),方波(TTL,HTL),集电极开路(PNP,NPN),推挽式
其中:
TTL是一种长距离差分驱动器(对称A,/A; B,/B; Z,/Z)。
HTL也称为推挽和推挽输出,并且编码器的信号接收设备接口必须与编码器匹配。
e)信号连接
连接的设备:计数器,PLC,计算机
连接方法:
1.单相连接:
用于正向和反向计算以及速度测量
2. A和B两相连接:
用于向前和向后系数,向前和向后判断以及速度测量。
3. A,B,Z三相连接:
用于位置测量,作为参考位置校正。
1)PLC和计算机之间连接的模块分为低速模块和高速模块,开关频率低而高。
2)三相连接:
由于连接了对称的负信号,电流对电缆的电磁场为零,衰减最小,抗干扰性最好,并且可以长距离传输。
对于具有对称负信号输出的TTL编码器,信号传输距离可以达到150米。
对于具有对称负信号输出的HTL编码器,信号传输距离可以达到300米。
© 2020 西门子(贝得)电机 版权所有 沪ICP备16040912号-3 xml
