您的需求 我的专业
![]() 全国免费热线:
全国免费热线:
您的需求 我的专业
![]() 全国免费热线:
全国免费热线:

通常,电动机连续旋转,但是步进电动机逐步旋转,因此称为步进电动机。每当输入脉冲信号时,电动机都会旋转一定角度(某些步进电动机可以直接输出称为线性电动机的线性位移)。因此,步进电机是将脉冲转换为角位移(或线性位移)的执行器。
步进电动机的转子为多极分布,定子的每个多相连接均具有内置的控制绕组。电脉冲信号由专用电源输入。每次输入脉冲信号时,步进电动机的转子都会向前迈进一步。由于输入是脉冲信号,因为输出的角位移是间歇性的,所以也称为脉冲电动机。
随着数字控制系统的发展,步进电机的应用将逐步扩大。
步进电机有几种类型,根据其结构可分为响应型和励磁型,根据数量可分为单相,两相和多相三种。阶段。步。
图1无功步进电动机的结构示意图
图1是电抗式步进电动机的结构示意图,定子中有6个均匀分布的磁极,绕组缠绕在磁极上。两个相反的刺激形成一个组,连接方法如图所示。
下面介绍无功步进电机的单3位,6位和双3位导通方法的基本原理。
首先,三重加电方法的基本原理
假设首先给相A通电,以产生沿A-A'轴向的磁通量,并形成一个穿过转子的闭环(相B和C不通电)。此时,A极和A极成为电磁铁的N极和S极。在磁场的作用下,转子总是试图旋转到磁阻最小的位置,即转子的齿与极A和A'对齐(图2a)。然后,B相通电(A和C相未通电),顺时针旋转30°时,齿与C和C'极对齐(图2c)。依次发送脉冲信号时,如果按A→C→B→A→.的顺序供电,则不难理解电机转子是逆时针旋转的。该通电方法称为单三比特方法。
图2在3次单次通电模式下的转子位置
2夜和6夜通电方法的基本原理
假设首先激活A相,并且转子齿与定子A和A'对齐(图3a)。然后,在仍为相A通电的同时打开相B。此时,定子B和B'极在转子齿2和4上产生自拔力,导致转子顺时针旋转,但是A和A'极继续拉动齿1和3,从而导致转子旋转。在两个磁张力之间达到平衡。此时的转子位置如图3b所示。即,转子从图(a)的位置顺时针旋转15°。然后,阶段A关闭,阶段B保持活动状态。此时,转子齿2和4与定子B和B'极对齐(图c),并且转子在图(b)中的位置旋转15°。其位置如图3d所示。这样,如果按照A→A,B→B→B,C→C→C,A→A .的顺序进行循环,则转子将以步进角沿顺时针方向旋转一级。 15°。切换电流6次,磁场旋转1次,转子前进螺距角。当按A→A,C→C→C,B→B→B,A→A .的顺序通电时,电动机转子将逆时针旋转。该通电方法称为6位方法。
B相通电。 A相和B相通电c。 B相通电d。 B,C相通电
图3将能量提供给6位时的转子位置
三重和双三重位激活方法的基本原理
如果每次给两相通电的顺序,即该顺序为A,B→B,C→C,A→A,B→.则在图2中称为双三位模式。 3b。您会看到,图3d的步距角为30°。因此,采用单三重和双三重方法时,转子以1个螺距角前进3步,并且每步前进螺距角的1/3,而采用6位方法时,转子前进。一个齿的螺距角分6步,并且螺距角的1/6在每一步中前进。因此,可以通过以下公式来计算步距角θ。
θ=360°/Zr×m
在公式中,Zr是转子齿的数量,m是运行钻头的数量。
对于典型的步进电机,最常见的步进角是3°或1.5°。从上式可以看出,转子不是具有4个齿(齿距角为90°),而是具有40个齿(齿距角为9°)。为了使转子齿与定子齿对齐,齿的宽度和螺距必须相同。因此,除了定子上的6个极以外,每个极面上还有5个小齿,与转子齿相同。步进电机的结构图如图4所示。
图4三相无功步进电机的结构图
从以上介绍可以看出,步进电机具有结构简单,维修方便,精度高,启动灵敏,停止准确的特点。另外,步进电动机的速度由电脉冲的频率确定,并与该频率同步。
是的,步进电动机的驱动力
步进电机必须配备专用电源。电源的功能是确保电动机的控制绕组按特定顺序运行,即控制输入电脉冲。该专用电源称为驱动电源。步进电机和驱动功率是集成在一起的,步进电机的驱动性能是由电机和驱动功率共同形成的综合效果。
1.驱动功率的基本要求
(1)驱动电源的相数,通电方法,电压和电流满足步进电机的需求。
(2)满足步进电机的启动频率和工作频率的要求。
(3)可以尽可能地抑制步进电动机的振动。
(4)工作稳定,抗干扰能力强
(5)低成本,高效率,易于安装和维护。
2.配置驱动器电源
步进电机的驱动功率主要由三部分组成:脉冲发生器,脉冲分频器和脉冲放大器(也称为功率放大器)(见图5)。

图5步进电机驱动电源框图
(1)脉冲发生器
脉冲发生器是一种脉冲信号发生器,其脉冲频率可以从几赫兹连续变化到几十千赫兹。脉冲发生器可以使用多种线路,最常见的是由单个结型晶体管组成的多个振动器和张弛振荡器,二者均通过调整电阻器R和电容器C的大小来改变电容器充电和放电的时间常数。目的是改变脉冲信号的频率。图6显示了两个实际的多重谐振电路,它们由一个反相器和一个非门组成,其振荡频率由RC确定,改变R值可以改变脉冲频率。
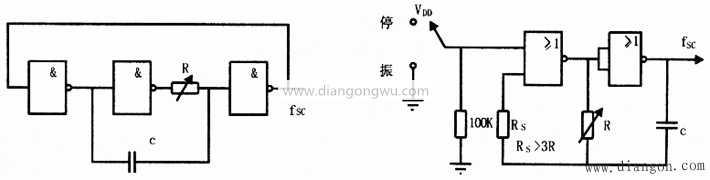
图6脉冲发生器实用仪器
(2)脉冲分频器
脉冲分频器的逻辑电路由门电路和双稳态触发器组成,并根据命令将具有恒定逻辑关系的脉冲信号添加到脉冲放大器中,从而使步进电机在具体操作。道路。以下重点介绍CH250环形脉冲分配器。
CH250环形脉冲分压器是用于三相步进电机的理想脉冲分压器。通过控制端子的各种连接,可以形成三相双三位和三相六位工作模式。如图7和图8所示。
图7 CH250三相双3位连接方法
图8 CH250三相6位连接
端子J3r和J3L是三相双三位控制端子,而J6r和J6L是三相六位控制端子。当三相双3位工作时,如果J3r=“ 1”和J3L=“ 0”,则电动机正向旋转;如果J3r=“ 0”和J3L=“ 1”,则电动机反向。当施加三相6位电源时,如果J6r=“ 1”和J6L=“ 0”,则电动机正向旋转;如果J6r=“ 0”和J6L=“ 1”,则电动机反向旋转。 R2是双三位复位端子,R1是6位复位端子,使用时,首先将对应的复位端子连接到高电平,切换到工作状态,然后再切换到工作位置。 CL端是时钟脉冲输入端,EN是时钟脉冲允许端,用于控制是否允许时钟脉冲。当在CL端输入脉冲CP时,仅当EN端为高电平时,时钟脉冲的上升沿才有效。 CH250还允许将EN端子用作脉冲CP的输入端子,此时,仅当CL为低电平时,时钟脉冲的下降沿才起作用。 A0,B0,C0是环形分配器的三个输出端子,每个输出端子连接到脉冲放大器(功率放大器)之后的步进电机的三相线。
表250中列出了CH250环形脉冲分频器的功能关系。
表2-1 CH250功能表
工作模式CL EN J3r J3L J3r J3L 6拍子正转反向0
0 0
0
0 0
0 1
0 0
1次三拍双拍正向旋转
反向0
0 1
1
0 0
1 0
0 0
0 6旋转节拍
 1反向
1反向
1 0
0 0
0 1
0 0
1次三拍双拍正向旋转
 1反向
1反向
1 1
0 0
1 0
0 0
0
(3)脉冲放大器(功率放大器)
因为脉冲分压器输出端子A0,B0,C0的输出电流很小,所以CH250脉冲分压器的输出电流约为200-400μA,步进电机的驱动电流也比较大。电流是3A。为了满足驱动要求,脉冲分频器的脉冲输出必须通过脉冲放大器(即功率放大器)。步进电机。图9是实用的脉冲放大器电路,该图使用三级晶体管放大,第一步使用3DG6小功率管,第二步使用3DK4中等输出管,第三步使用3DD15大功率管和R6是步进电机。限流电阻取决于所安装的电动机。
图9脉冲放大器的实际电路
图10高压和低压开关驱动电源的原理图
图9所示的电路是单电压驱动电源。其特点如下:电路很简单。您可以通过将电阻器R6与控制绕组串联来减少环路的时间常数。效率降低,并且由该电源驱动的步进电动机的启动和运行频率不太高。高压和低压开关电源可用于提高电源的效率和工作频率。原理如图10所示。它使用高压电源来加快电流的增加速度,并使用低压来维持稳定的电流值。目的是通过在低压电源中串联一个较小值的电阻器来调节控制绕组中的电流并平衡各相中的电流。
© 2020 西门子(贝得)电机 版权所有 沪ICP备16040912号-3 xml
