您的需求 我的专业
![]() 全国免费热线:
全国免费热线:
您的需求 我的专业
![]() 全国免费热线:
全国免费热线:

前言
步进电机是一种无刷电机,可以将电脉冲转化为机械旋转。顾名思义,它根据输入脉冲逐渐旋转,是现代数字程序控制系统中的主要执行元件。
与其他电机相比,步进电机一般有五个明显的特点:
首先,可以实现精细和正确的定位。
其次,可以简单地用脉冲信号控制。
第三,体积小,扭矩大。
第四,可以自己保持止损位。
第五,可以进行大惯性负载。
广泛用于工业、医疗和消费电子应用。简而言之,它用在任何需要精确旋转或定位物体的地方。
在单片机领域有着广泛的应用,所以给大家分享一个小项目。
-操作
步进电机内部线圈原理图:

步进电机通常有多个励磁线圈(相)和一个齿形转子。电机的步长由转子的相数和齿数决定。步长是转子在一步中的角位移。例如,如果步进电机有4相50齿,则旋转一周需要504=200步。因此,步距角为360/200=1.8。
这次用的步进电机有4极,1/64减速齿轮机构,增加扭矩。电机的步距角为5.64。但考虑到减速齿轮,输出轴的步距角为5.64/64。

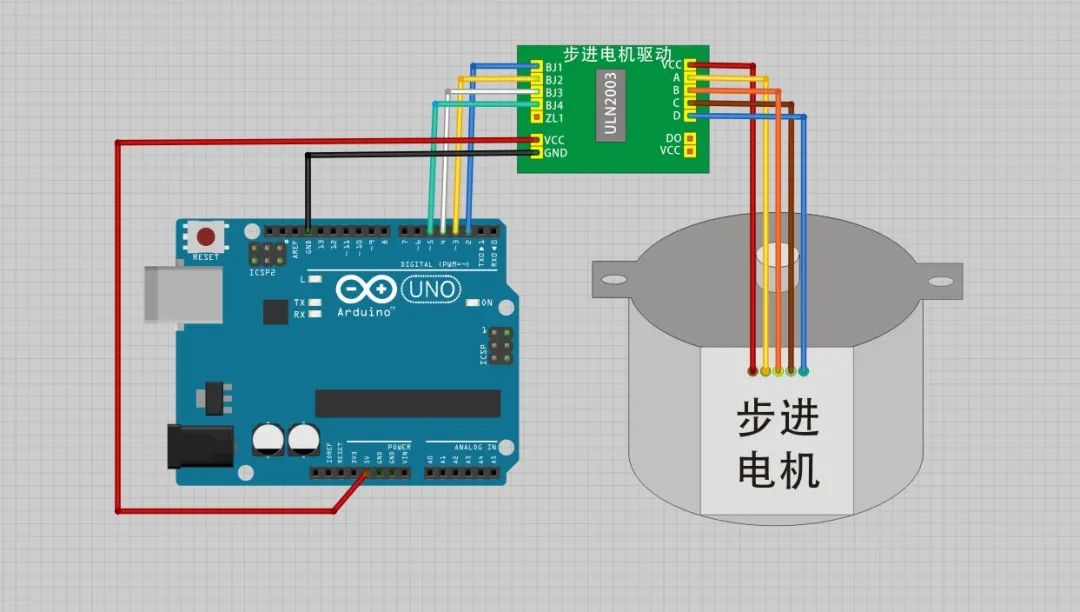
电路原理图:
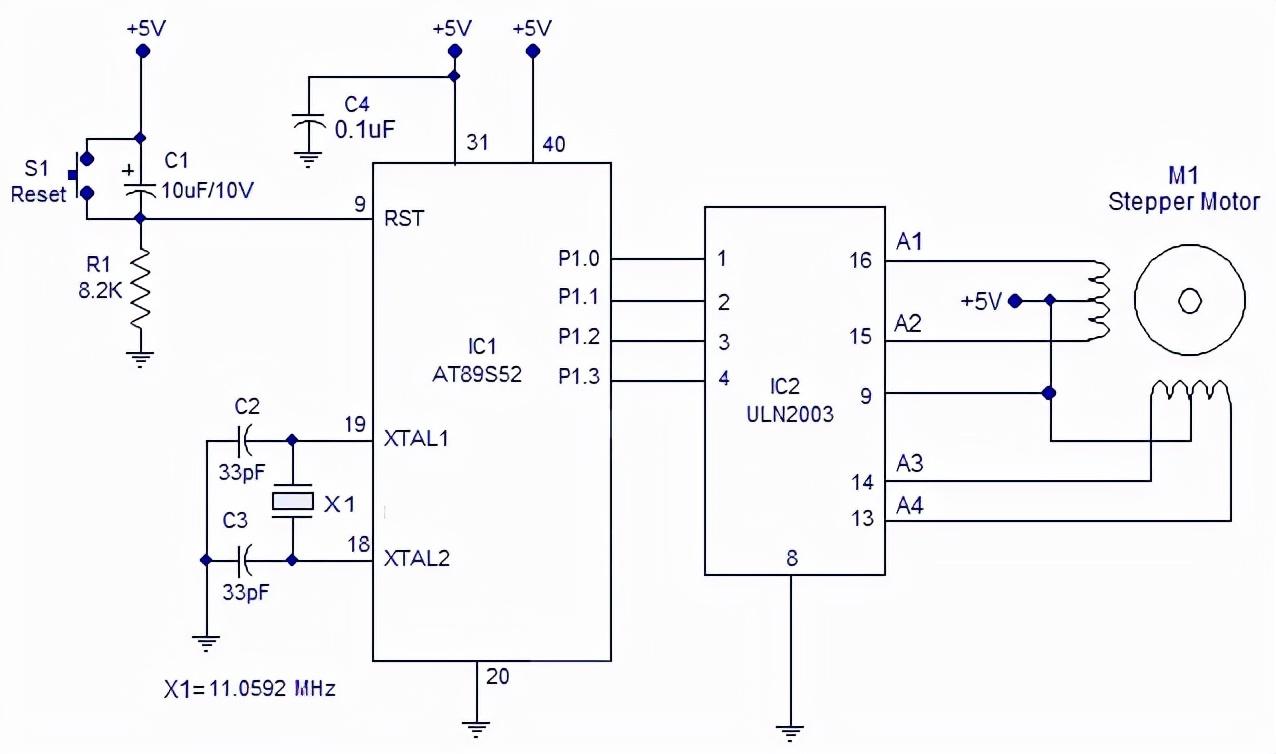
根据电路图连接到8051的步进电机的P1.0、P1.1、P1.2和P1.3引脚分别用于控制步进电机的A1、A2、A3和A4相。ULN2003用于驱动步进电机的每一相。
ULN2003是一种达林顿晶体管阵列,用于驱动继电器、电机等大电流负载。ULN2003有8个独立的通道,每个通道的容量为1A。通道可以并联连接,以增加电流容量。每个通道都配有一个独立的续流二极管,通过提供逻辑低电平来激活该通道。例如,如果我们将ULN2003的引脚1设置为低电平,步进电机的A1将被打开。
程序设计
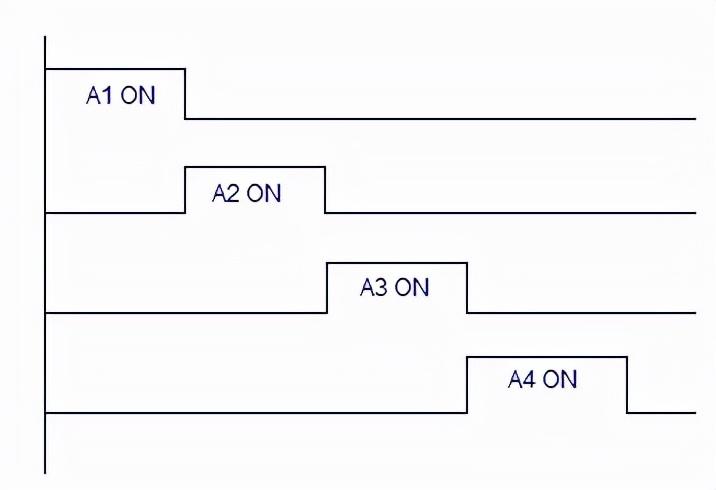
按照上图的线索顺序,按时间顺序循环到A1、A2、A3、A4。
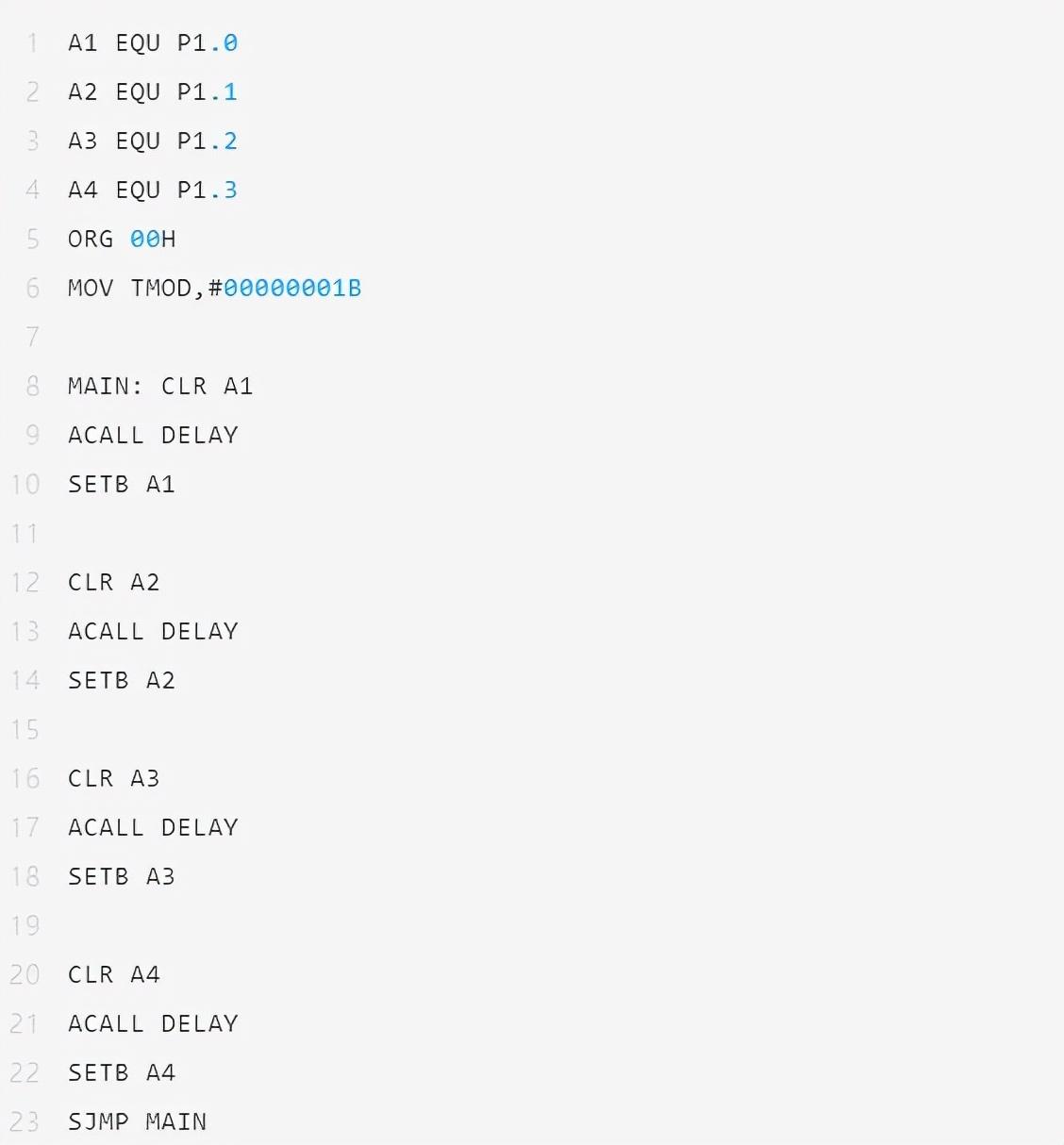
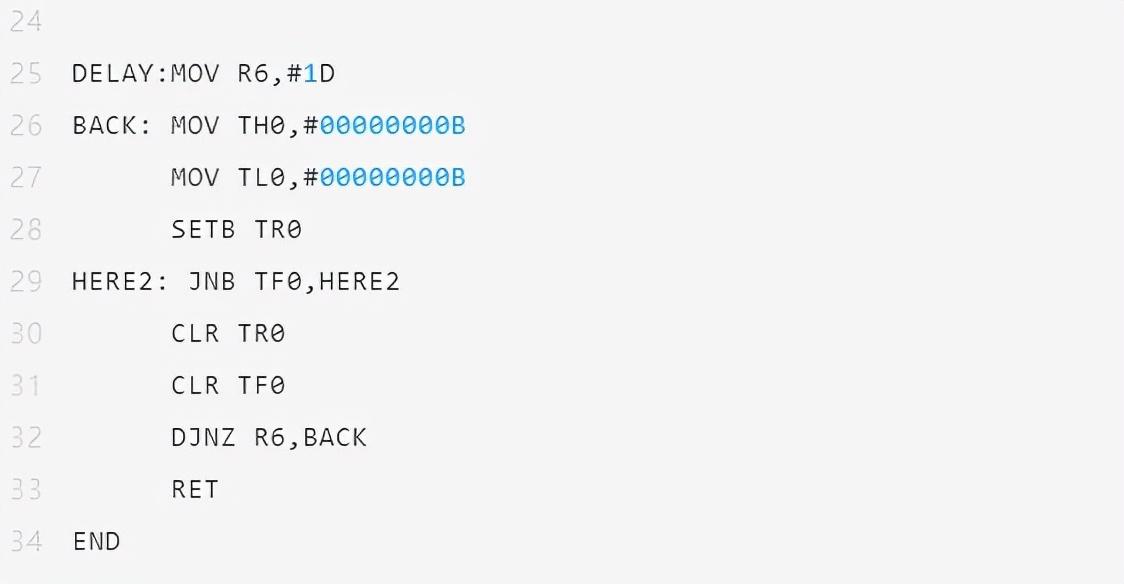
首先,程序清除P1.0以启动步进电机(A1),并保持此状态65ms,然后将P1.0设置为1以禁用电机的第一相。然后对P1.1到P1.3重复同样的过程,反复重复整个循环,使电机顺时针旋转。
定时器0配置为模式1,产生65毫秒的延迟。65毫秒是每个控制脉冲的宽度。
结束
这个小项目很简单,主要是因为电机控制在单片机项目中太常见了,需要掌握。希望这篇分享可以帮助到有需要的同学。
想要高级单片机的同学,找我收入门和高级教程,加入我们,可以和导师一对一互动,快速成长。
© 2020 西门子(贝得)电机 版权所有 沪ICP备16040912号-3 xml
