您的需求 我的专业
![]() 全国免费热线:
全国免费热线:
您的需求 我的专业
![]() 全国免费热线:
全国免费热线:

这不是好是坏,主要是因为应用场景和价格不同。
它称为绝对电动机,根据编码器信号类型分类为增量电动机。电动机本身没有区别,主要区别是电动机背面的编码器。
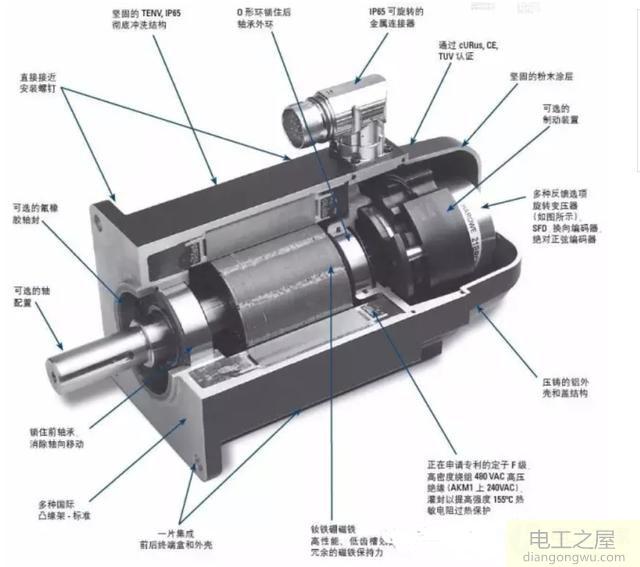
编码器位于伺服电机的后端。
增量编码器和绝对编码器之间的差异
编码器的原理是将旋转位置的变化转换为电信号。编码器用于轴的闭环控制和大多数自动化过程。编码器生成速度或位置的实际测量值,以进行闭环控制。
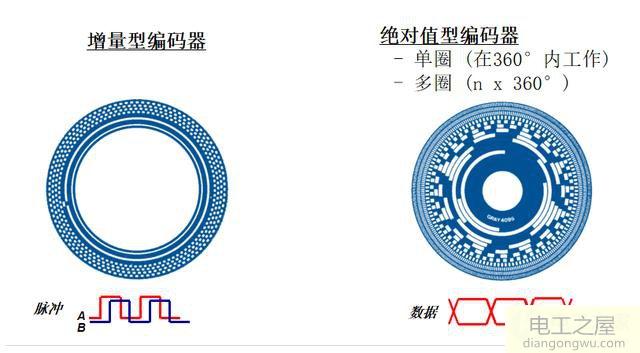
增量编码器:
两个正交脉冲序列A,B和零标记Z。当增量编码器轴旋转时,应使用随后的方向电路和计数器确定旋转方向并实现脉冲数的增加或减少。计数起始点可以任意设置,可以无限累加和多圈测量,也可以使用传输到机械参考零点的零脉冲信号。缺点是停电后没有存储功能,必须借助相应的辅助电路来实现。
从公众的角度来看,增量编码器可以实现相对较少的点位置。例如,需要暂停一些关键点才能通过伺服电机将物体拉至一定高度,而增量编码器可以做到这一点。但是,如果您拉起该过程,则电源可能会停止,但是在重新启动后,需要采取完整的措施才能继续上一个过程。这样增量编码器将无法执行此操作,并且绝对编码器的值将突出显示。
光学增量编码器的原理
绝对编码器输出:
二进制或其他代码系统中对应于一对一位置的字符串。它是在整个范围内具有绝对零和直接读数的单值函数。它具有无与伦比的掉电存储功能和增量编码器。通常情况下,绝对值编码器的范围为0°至360°,通常用于角度测量,现在,绝对值多圈编码器已广泛用于相关控制领域,例如长度测量和角度测量。
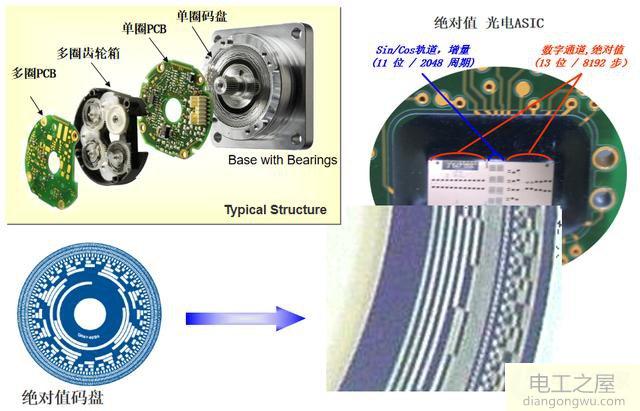
绝对编码器使用二进制数字信号输出。这意味着您可以在没有计数器的情况下读取与轴上任何位置的位置相对应的固定数字代码。
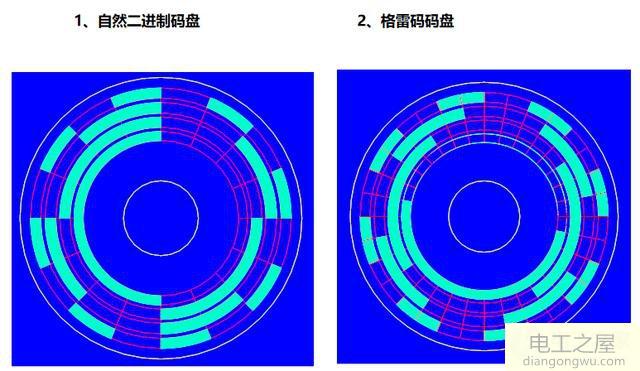
绝对编码器的代码盘,光信号可以通过该代码盘直接显示电动机的旋转。
好的。聊了很多之后,我想告诉您这两个电机的编码器是不同的。
前面提到的最大区别是,如果需要像层压设备一样使用高精度,则需要将电动机的绝对位置实时传输到其他设备,例如视觉系统或其他设备。对于机器人,请使用绝对编码器。
如果是恒定速度或扭矩输出,例如使用伺服电机精确控制线性体的运动,则可以使用增量型。
最大的成就是,价格的绝对值比增量价格贵了1-200元人民币。这基于功率部分。如果数量更多,则价格差异可能会更大。
© 2020 西门子(贝得)电机 版权所有 沪ICP备16040912号-3 xml
