您的需求 我的专业
![]() 全国免费热线:
全国免费热线:
您的需求 我的专业
![]() 全国免费热线:
全国免费热线:

细分步进驱动器也称为微动驱动器,最近已集成到细分步进驱动器中。细分的步进驱动器将以全步进驱动器的步距角逐步以n步的方式逐步增加每个相的电流,以使拉动转子的力逐渐变化。每当转子停在平衡点时,力和总步距角都会细分为n,从而使转子平稳运行,因此可以说是减少低速行驶过程中振动的有效方法之一。
下图显示了4微步两相步进电动机各相电流波形的概念图。各相的电流值的峰值相同,相差为90°。该电流的大小不必相等地增加,并且平均曲线通常变为正弦波。
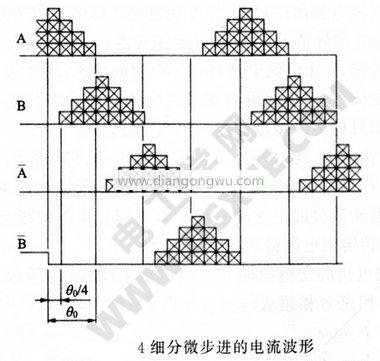
改变该电流值的方法与先前电路图中的恒定电流斩波器部分相同,并且预先控制输出电路以确定电流波形。上图显示了提供给两相步进电机的细分电流,下图显示了转子的细分步进情况。

在上图中,第一个图中的1是A相电流的峰值状态,而2是A相电流从第一级的峰值电流减小到3 /的电流的状态。第四阶段。B相电流从峰值电流的0增大到1/4的过程中变化; 3是A相电流从峰值电流下降到峰值电流的1/2,B相电流是峰值电流的1/2。峰值,并且两个电流相同:4表示A相。电流继续减小到四分之一峰值,B相电流上升到3/4峰值5处于该状态。当A相电流从峰值电流变为零且B相电流增加到峰值时。本文的第一张图显示了定子的每个相位以及相应的转子步进的励磁电流的大小。
此时简化图,A相和B相的螺距θ0为步距角,转子电流每次变化,每个步距θ0/4,即已知步距的1/4角。通常,使用这种分割方法,电流波形可以接近正弦波。这里,通过增加细分步骤中的细分量,电流可以近似于正弦波,并且旋转转矩也可以改变为正弦波。
下图显示了两相步进电动机的交叉耦合的磁通量和电流模型。
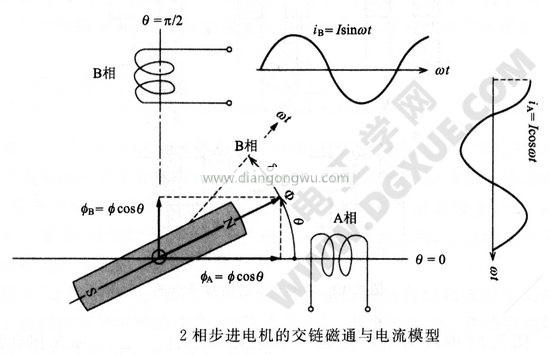
电流以角速度ω表示,相A领先于相B(π/2),当前公式为:
iA=Icosωt
iB=Isinωt
考虑到相位差π/2,励磁磁通处于A相和B相的交点,根据上图,它变为以下公式:
ΦA=Φcosθ
ΦB=Φsinθ
假设A相转矩为TA,B相转矩为TB,两相微步进驱动器的合成转矩为T2。考虑最简单的模型,如果公式(T1=NNrI(dΦ/dθ))N=1,Nr=1,则扭矩公式为:
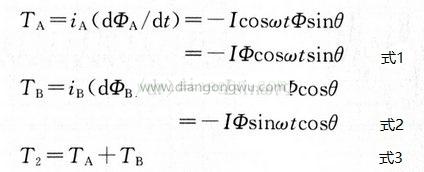
转子与定子的旋转磁场同步,并以负载角δ旋转(例如《PM型电机转矩的产生及负载角》和《HB型电机的转矩与负载关系》的δ)。下面的公式是:
θ=ωt-δ
将上面的等式3代入等式1,等式2,θ=ωt-δ,我们得到以下等式。

表示T2除去包含ω的项,并且δ取某个值以获得类似于正弦波的转矩。上面的等式(T2=IΦsinδ)在上面的《PM型电机转矩的产生及负载角》和《HB型电机的转矩与负载关系》曲线图中给出了扭矩,并且当负载增加时,δ也增加,并且当它达到π/2时,成为最大值。
上述细分步进驱动方法是减少振动的非常有效的方法。此时,由永磁体产生的磁通的分布被假定为正弦波。 HB型步进电动机的转子在dq轴方向上被两个磁通量隔开,并且磁极中有许多齿,因此易于产生谐波,因此除了公式T2的值之外=IΦsinδ,它还包含磁场的其他频率配置。
在上述细分式步进驱动的情况下,减少振动的要点如下。
第一、在低速下,细分步进越多,效果越好。两相步进角为0.9°(定子的主极数为16)的步进电动机的速度约为150 rpm以上,并且减小振动量的效果不清楚。如果输入脉冲频率太快,则由于无法获得细分的步进波形所需的电流波形,因此电动机的跟踪精度会降低。
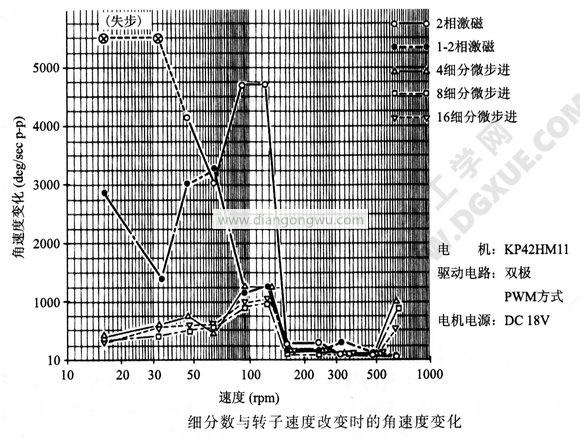
第二、分段步进和减振效果:从理论上讲,减振效果随着细分数量的增加而变得更加明显,但是当细分为8时,实际效果不会显着变化。例如,分割8和分割16之间没有效果差异(即效果没有变化)。下图显示了具有16个两相HB型主极的0.9°步进电机的细分数量和速度波动图像。
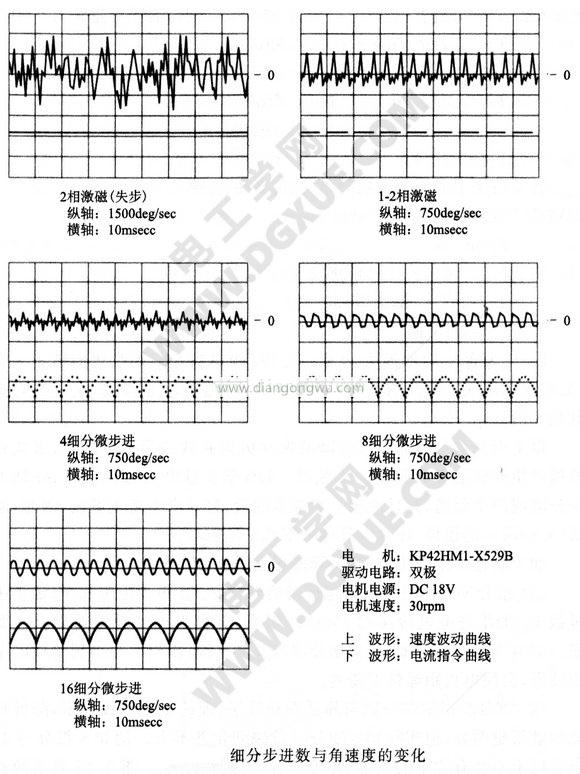
下图显示了细分数量的变化和转子速度的变化,该电机是具有16个主极的两相HB型0.9°步进电机。两者都是2相激励,1相或2相激励,并且在4个分区中没有显着差异。从上图可以看出,当转数大于150rpm时,步进角为0.9°的电动机的励磁模式会发生变化,但速度变化并没有太大的不同。
下图显示了三相HB型全步距角时的电流波形和电动机旋转波形,以3.75°的步距角将2分频,4分频和8分频。角度。可以看出,当细分时,电流波形(8)接近正弦波。细分步骤的细分编号是确定驱动电路的复杂性和成本的原因之一,并且应根据使用目的和速度合理选择不同的驱动电路。

第三、细分角度可以定位,但是精度不高,因此细分两相或单相传导模式用于定位控制。
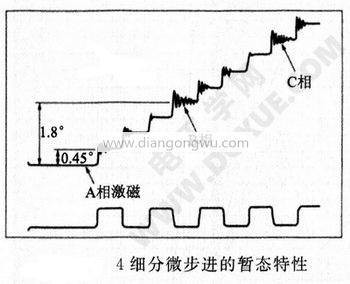
第四、在相同情况下,过渡过程有所不同,因为在颗粒状步进过程中每个步骤的瞬态特性都包括诸如一相励磁或两相励磁之类的工作状态。下图说明了这种情况。
© 2020 西门子(贝得)电机 版权所有 沪ICP备16040912号-3 xml
