您的需求 我的专业
![]() 全国免费热线:
全国免费热线:
您的需求 我的专业
![]() 全国免费热线:
全国免费热线:

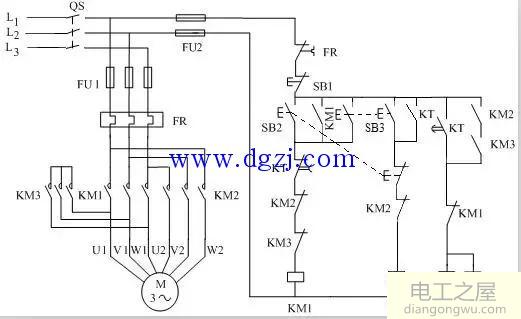
异步交流电动机速度控制方法的说明
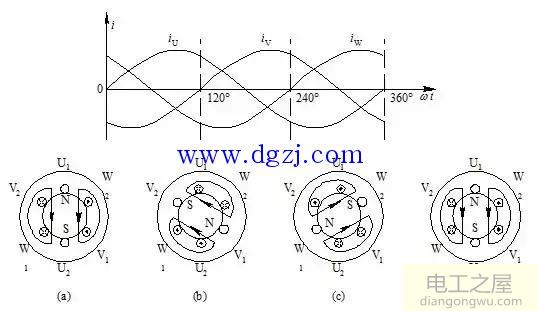
由于普通异步电动机在正常运行期间的滑差率S非常小,因此电动机速度n=n1(1-S)由同步速度n1决定。在n1=60f1/P的情况下,可以看到,当电源频率f1不变时,通过改变定子绕组中的极对P的数量,同步速度n1会发生变化。速度降低一半,电动机的速度也降低约一半。显然,这种速度控制方法只能逐步改变速度,不能平稳地进行速度控制。

换极电机通常使用鼠笼式转子。因为鼠笼转子的极对数可以根据定子的极对数自动改变,所以定子和转子的极对数的磁场总是相同的,并且平均电磁转矩。在绕线转子的情况下,如果改变定子中的极对数,则非常不方便,因为必须相应地连接转子绕组,以获得与定子相同的极对。

使定子具有两个极对的一种简单方法是使用两组具有不同极对的定子绕组,并每次使用其中的一对。显然,这是完全不同的事情。经济方法仅在特殊情况下使用。理想的方法是仅安装一组定子绕组并更改绕组连接以得到多个磁极对。这就是所谓的单绕组极变化。对于双极比(例如2/4极,4/8极等),人们长期以来一直采用单绕组极数变化。由于科学技术的进步,非双极比(例如4/6极,6/8极等)改变了极速和使用单个绕组极的三种速度(例如4/6/8等)变化也被广泛使用这是可能的。
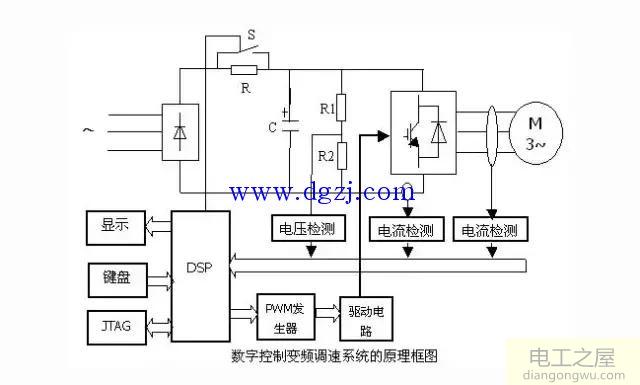
变频调速
当更改电源的频率f1时,同步速度n1=60f1/P随频率成比例变化,因此电动机速度n也随之变化,因此,如果更改电源频率,则速度可以为调整顺利。异步电动机。

根据各种控制方法,变频调速可分为U/f控制,滑差频率控制,矢量控制和直接转矩控制。
(1)U/f控制。 U/f控制基于改变功率频率以进行速度调节的思想,同时保持电动机的磁通量完整,以实现理想的转矩速度特性。基本上,通用逆变器使用此控制方案。 U/f控制变频器的结构非常简单。缺点是逆变器采用开环控制模式,无法实现更高的控制性能,并且必须在低频下执行转矩补偿以改善低频转矩特性。
(2)睡眠频率控制。变频调速可以使电动机具有相应的输出转矩。此控制方法必须安装在控制系统中。滑差频率控制是一种直接控制转矩的控制方法,它基于U/f控制,知道与异步电动机实际速度相对应的工频。这是一种闭环控制方法,因为它可以根据所需的转矩调整变频器的输出传感器,有时还会添加电流反馈以控制频率和电流。该方法可以提高逆变器的稳定性,并且对突然的加减速和负载变化具有良好的响应特性。
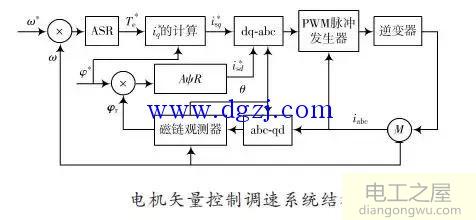
(3)矢量控制。矢量控制是通过矢量坐标电路控制电动机定子电流的大小和相位,以分别在d,q和O坐标轴系统中控制电动机的励磁电流和转矩电流,然后再实现。电机转矩控制的目的。 (https://www.dgzj.com/电工之家)通过控制每个向量的运算顺序和时间以及零向量的运算时间,可以实现各种控制目的,例如形成各种PWM波以形成最小PWM。减少开关损耗。当前,变频器中实际使用的矢量控制方法主要是基于特定差频控制的矢量控制方法和不带速度传感器的矢量控制方法。
基于转差频率的矢量控制方法和转差频率控制方法的正常特性相同,但是基于转差频率的矢量控制也通过坐标变换来控制电动机定子电流的相位。必须满足某些条件才能消除转矩电流转换过程中的波动。因此,与睡眠频率控制方法相比,基于睡眠频率的矢量控制方法可以在输出特性方面得到显着改善。然而,该控制方法是闭环方法,并且需要在电动机上安装速度传感器,因此其应用范围受到限制。
无速度传感器矢量控制是通过坐标变换处理分别控制励磁电流和转矩电流,然后通过控制电动机定子绕组的电压和电流来确定转速,从而达到励磁控制的目的。电流和转矩电流。该控制方法调速范围广,启动转矩大,运行可靠,操作方便,但计算较为复杂,通常需要专用处理器进行计算。因此,该方法的实时性能并不理想,并且控制精度受计算精度的影响。
(4)直接转矩控制。直接转矩控制可达到以下目的:使用空间矢量坐标概念在定子坐标系中分析交流电动机的数学模型,控制电动机的磁通量连接和转矩,并通过检测定子电阻来观察定子磁通量连接。从而省去了矢量控制和其他复杂的变换计算,系统直观简洁,与矢量控制方法相比,提高了计算速度和精度。即使在开环状态下,它也可以输出100%的额定转矩,并且具有用于多个驱动器的负载平衡功能,其中一个逆变器为多个电机供电。
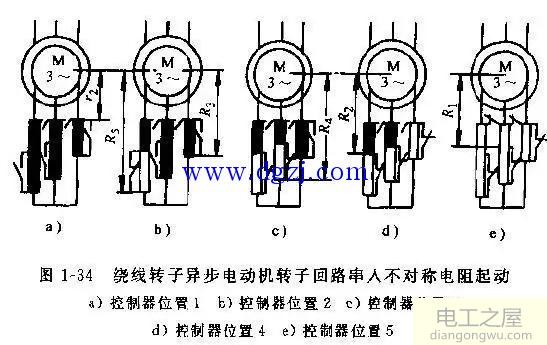
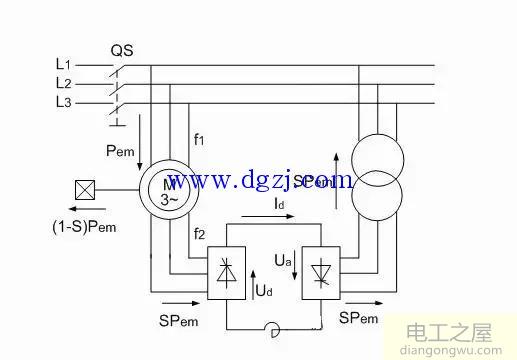
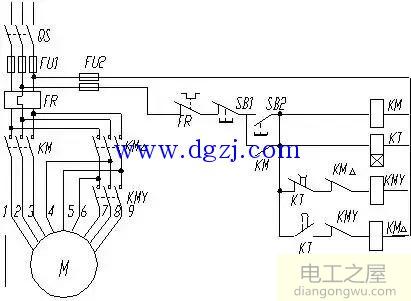
转子电路串联电阻调速
在转子电路中串联一个可变电阻器进行速度调节仅适用于绕线异步电动机。调速接线图与起动器相同,不同之处在于典型的起动压敏电阻在短时间内工作,而用于调速的压敏电阻则需要长时间运行。
调速的物理过程与电枢电路中带有串联电阻的直流电动机的调速相同。在变阻器的电阻增加的第一时刻,电动机的速度太慢,因此转子电流减小,并且电磁转矩相应地减小。电动机的速度开始降低,转子电势开始增加。转子电流再次返回。这个过程一直持续到转子电流增加,直到相应的电磁转矩和总负载转矩达到平衡为止,此时电动机以低速稳定运行。
当转子回路与调速电阻器串联时,如果电动机的总负载转矩不变,电动机将从一个工作点移动到另一个工作点,并且转差率从S1增大到S2。速度从n1(1-S1)增加到n1(1-S2)。如果增加调速阻力,速度下降的幅度甚至更大。
从转子环线电阻速度控制曲线图(略)可以看出,在一定的速度控制电阻范围内,速度控制范围的大小取决于负载的重量。在空载条件下进行调节,速度控制范围非常大。如果太小,您将无法真正实现速度调节的目的。
此外,在恒定转矩速度调节中,在电磁转矩参数表达式中(省略),滑差速度s与恒定转矩速度调节期间的转子电路的总电阻和总电阻成正比地变化。它增加了一倍,滑移速度也增加了一倍,因此您可以在等效电路中看到它。通过调节恒定转矩速度,定子和转子电流,输入功率,气隙磁场和电磁功率均保持不变,与电阻转子电路串联连接,并且尺寸无关紧要。因此,如果将速度调整得较低,即转差率越大,转子电路中的串联电阻就越大,转子中的铜损越大,则电动机的效率就越低。这种调速方法是非常不经济的,并且通过降低速度可以看出,所有降低的输出功率都被调速电阻器中的铜损耗所消耗。另一个缺点是在将电阻添加到转子后,电动机的机械性能会变软。
© 2020 西门子(贝得)电机 版权所有 沪ICP备16040912号-3 xml
